Kun polkupyörät tulivat käyttöön 1800-luvun lopulla, niitä varten piti hankkia ajokortti. Perustettiin hyvämaineinen komitea opettamaan ajamisen teoriaa ja käytäntöä sekä myöntämään ajokorttikilpiä. Kukaan ei saanut luovuttaa ajoneuvoa. Varovaisuutta perusteltiin kaksipyöräisen ajoneuvon kuljettamiseen liittyvällä suuremmalla riskillä. Tavallinen ihminen ei voi ymmärtää, miksi polkupyörä ei kaadu liikkuessaan. Yllättävää kyllä, edes pyörillä toimivien järjestelmien toimintaa tutkivat fyysikot eivät pysty vastaamaan tähän yksinkertaiseen kysymykseen yksiselitteisesti.
Teoreettinen analyysi ja fysiikan kokeet ovat osoittaneet, että gyroskooppinen momentti ja positiivinen haarukan liikerata eivät riitä pyörän vakauteen. Ohjatun ohjauksen lisäksi on myös automaattinen ohjaus. Lisäksi kuorman jakautumisella on keskeinen rooli tasapainon ylläpitämisessä. Kuten huomaat, pyörän melko pitkän käyttöiän aikana uusia ominaisuuksia löydetään ja hiotaan edelleen.
Miksi polkupyörä ei kaadu, kun se ajaa
Helpon tehtävän selittämiseksi käytetään usein metaforaa: ”se on yhtä yksinkertaista kuin pyöräily”. Itse asiassa on estettävä liikennevälineiden putoaminen. Aluksi ajateltiin, että polkupyörä kulkee ajajan kustannuksella. Henkilö aistii rakenteen kaltevuuden, kääntää ohjaustankoa hieman putoamissuuntaan ja tasoittaa kyydin. Mutta suuressa nopeudessa pyörä saavuttaa vakauden, eikä se kaadu, vaikka ohjaustanko vapautetaan. Myöhemmin esitettiin hypoteeseja etupyörän gyroskooppisesta toiminnasta ja ohjauksesta. Mutta kävi ilmi, että ohjaamattomat pyörät ja robottipyöräilijätkään eivät kaadu.
Tärkein vakautta koskeva kysymys on: mikä aiheuttaa sopivan suhteen laihuuden ja kääntymisen välillä? Yleisesti hyväksytty näkemys on, että vaikutus on seurausta pyörimismomentista (gyroskooppisesta) ja positiivisesta haarukan ulottumasta. Etupyörän vakauttava vaikutus ja keskipakovoima, joka aiheutuu liikkeen poikkeamisesta suorasta radasta, ovat välttämättömiä tekijöitä pyörän tasapainon kannalta.
Fysiikan näkökulmasta
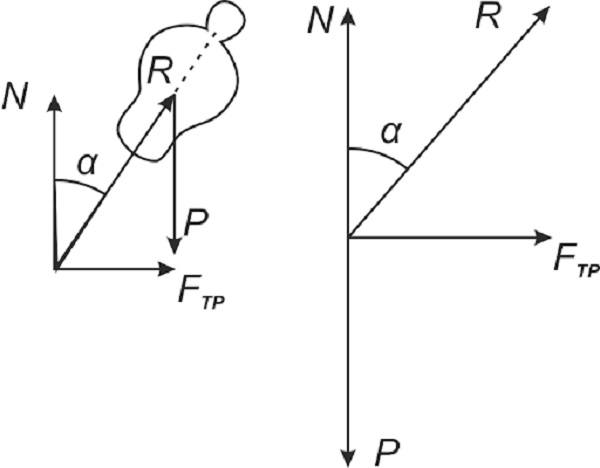
Tutkijat ovat tunnistaneet mallin, joka pitää kaksipyöräiset ajoneuvot vakaina. Etuhaarukka on keskipisteessä. Järjestelyyn kuuluu ohjaustangon akselin kallistaminen maahan nähden. Risteyskohta on pyörän pyörän ja tien kosketuspisteen edessä. Jos peräsimen kulma poikkeaa asetetusta arvosta, syntyy reaktiovoima, joka palauttaa kuljetuslaitteen takaisin paikalleen. Näin pyörä itse auttaa pitämään tasapainon.
Käännöksen tekeminen edellyttää, että ratsastaja muuttaa painopisteen sijaintia. Esimerkiksi kun pyörä on kallistettu oikealle, myös etuakseli on kallistunut oikealle, ja pyörä, joka pyörii myötäpäivään (alhaalta katsottuna), siirtää osittain reaktiivisen vääntömomentin ohjausyksikköön. Keskipakovoima pyrkii kääntämään ohjauspyörää oikealle. Kääntyäkseen pyöräilijä nojaa vasemmalle, jolloin pyörä ja pyörät kääntyvät oikealle.
Toinen ajoneuvon vakauttamiseen käytetty tekijä on nopeuden lisääminen hidastettaessa ja ohjauksessa. Vakauttava vaikutus palauttaa pyörät oikeaan asentoon ja estää pyörää kaatumasta. Kokenut pyöräilijä käyttää käsiä kiinnityspisteisiin ohjaamaan 2-3 mm tielle.
Gyroskooppinen vaikutus
Tasapainoteoria perustuu tunnettuun fysikaaliseen ilmiöön, jota käytetään avaruudessa, ilmailussa ja merenkulussa. Pyörivän kappaleen ominaisuutta säilyttää liikesuuntansa kutsutaan gyroskooppivoimaksi. Toiminta näkyy, kun ajetaan polkupyörällä sen ollessa kallistettuna. Niin kauan kuin pyörät pyörivät, ajoneuvo pysyy tasapainossa eikä kaadu. Esimerkiksi joulupukki tai lasten helikopteri ”toimii” vain silloin, kun se pyörii. Hypoteesin testaamiseksi fyysikot loivat erikoispyörän. Etupuolelle asennettiin ylimääräinen pyörä, joka ei koskettanut maata ja pyöri vastakkaiseen suuntaan. Kokeen tulos yllätti tutkijat. Pyörä liikkui täydellisesti eikä kaatunut ilman gyroskooppia.
Näin ollen tutkijat ovat vahvistaneet kaksipyöräisen ajoneuvon vakauteen vaikuttavat päätekijät, ja he keskustelevat edelleen uusista versioista.
Mielenkiintoisia faktoja
V.A. Jakubovitš
- Matemaattisen teorian, joka selittää polkupyörän vakauden liikkeessä, esitti luonnontieteiden tohtori V.A. Jakubovitš. Tutkija selitti, miksi polkupyörää ohjaavaa autonomista robottia ei ole koskaan luotu. Internetissä liikkuneet tiedot mekaanisista pyöräilijöistä osoittautuivat väärennöksiksi. Tarkempi tarkastelu paljasti kyberneettisen henkilön useita temppuja. Keksijät kiinnittivät painoja rakenteen vakauden lisäämiseksi, alensivat painopistettä ja kiihdyttivät ajopyörän suuriin nopeuksiin.
Tutkijan vastustajat todistavat muuta. Robotti oppii hyvin nopeasti. Tämä johtuu sen tehtävien suhteellisesta yksinkertaisuudesta: sinun on vain opittava pitämään tasapainosi. Sillä on kyky, jota ihmisillä ei ole: se reagoi välittömästi ja ”nykäisee” pyörää 5 kertaa sekunnissa.
- Polkupyörä, jossa ei ole ajajaa, voi automaattisesti ohjata itseään kaatumisen estämiseksi”, väittävät yhdysvaltalaiset tutkijat. Linearisoitujen stabiliteettilaskelmien ansiosta tutkijat ovat suunnitelleet pyörän, jossa ylimääräiset pyörät kääntyvät vastakkaiseen suuntaan ja ohjaustangon asento on negatiivinen.
- Psykologien näkemys eroaa fyysikoiden näkemyksestä. Pyörän energialähteet ovat kuljettajan päässä. Ihmisen aivot tekevät kovasti töitä estääkseen meitä kaatumasta. Taito ja taito piilee alitajuisissa asenteissa, jotka pitävät pyöräilijän tasapainossa.
Päätelmä
Todisteet tukevat gyroskoopin ja kallistuksen merkitystä pyörän pitämisessä vakaana ajon aikana. Mutta ei ole selvää selitystä sille, miksi pyörä ei kaadu, kun ajat. Saattaa olla olemassa lisävoima, jonka ymmärtäminen on väliaikaisesti nykytietämyksen ulkopuolella.






Uskon silti, että pyörä ei kaadu ajaessa, koska kuljettaja säilyttää tasapainonsa ja korjaa sen kääntämällä ohjaustankoa kaatumisen suuntaan. Pyörään kohdistuvan gyroskooppisen vääntömomentin vaikutus ajettaessa on epätodennäköinen, pyörän nopeus ja pyörän massa eivät ole riittävän suuria reaktiivisen vääntömomentin luomiseen.
Ohjauskokeilu ei vahvistanut, että ratsastaja pitää tasapainon. Työnnä pyörää kovaa ilman ajajaa, niin se kulkee eikä kaadu, vaikka ohjaustanko olisi jumissa.